Configuring servo motors and drives through network control software can be cumbersome and time-consuming
EtherCAT Soft Motion Control Auto-Configuration
Contributed by | Kingstar
Challenges With Traditional Ethercat Configuration Processes
EtherCAT is a very flexible protocol. It allows connection of I/O modules, motor, drives, communication devices, couplers and even controllers. For each hardware type, there are different data exchange methods. A motor drive can use CANopen over EtherCAT (CoE) or SERCOS over EtherCAT (SoE) and multiple control modes like position, velocity and torque. EtherCAT also ensures that hundreds of devices can be used together and be precisely synchronized.
This flexibility, however, comes with significant drawbacks: configuring servo motors and drives through network control software is cumbersome and time-consuming.
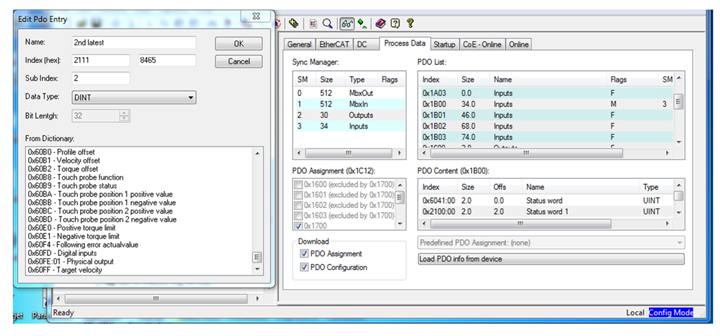
To set up the link, the EtherCAT master has to know the location and variables that each device will use. The standard method to do this is to obtain the files describing which functions each hardware supports, called an EtherCAT Slave Information (ESI) file. This file is then imported in a Graphical User Interface (GUI) tool. This GUI can detect which devices are connected and let you browse through and choose which functions to enable based on the functions described in the ESI. This configuration is complex, as there are so many possible functions.
The GUI will then export a file describing the devices with their node position on the fieldbus, and which functions should be enabled. This procedure has to be done every time a piece of hardware is changed or added or a function is enabled/disabled. This configuration is very time consuming.
To address these challenges, many vendors will pre-integrate settings for some types of hardware so that they can be configured automatically. But this solution quickly adds issues of its own around proprietary systems. Because vendors want to sell their own solutions, they will only pre-integrate their own hardware, and hide the settings to make it extremely difficult to use with devices from other vendors.
THE KINGSTAR AUTO-DISCOVER AND CONFIGURATION PROCESS
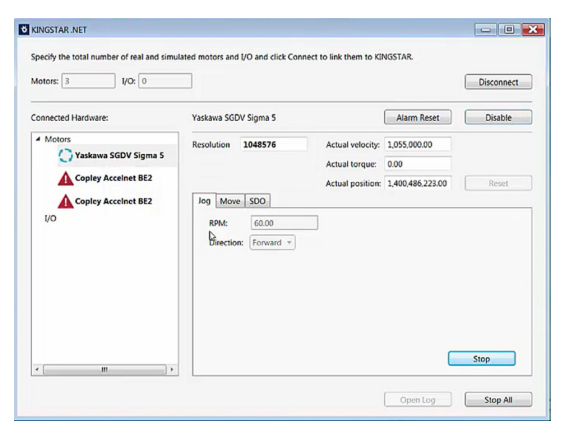
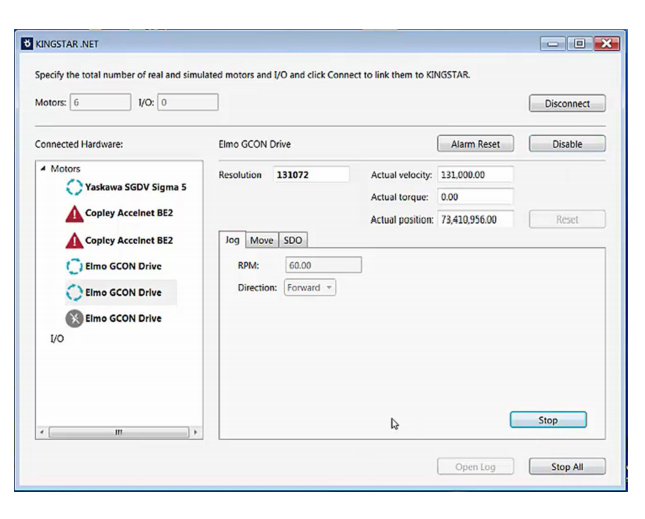
KINGSTAR eliminates these challenges with autoconfiguration enabled by a list of pre-tested and preintegrated drives based on the CoE standard. Using the CoE network, KINGSTAR can configure most drives, from major manufacturers. It is open to all I/O and drives, with the ability to add new ones and make changes when new hardware is introduced. Network configurations can be changed at any time and then immediately run, so your system becomes literally “future proof.”
Instead of downloading and installing separate ESI files (based on XML) for each I/O or motor, KINGSTAR includes the most commonly used device information by default. Objects get built for each device in the whole EtherCAT network by recording vendor and product IDs. When an engineer runs KINGSTAR, the software immediately surveys the network for new, replaced, or edited I/Os, servo motors and drives, then instantly configures the network. This allows the engineer to access, understand, and communicate with all available I/O, motors and drives from the moment their program begins to run. The KINGSTAR API provides all of the variable information that you need to know, in order to write your applications.
What if a manufacturer makes a change to their drive? While KINGSTAR provides a set of defaults for the most commonly used hardware, we carefully and meticulously monitor updates to all major motors and manufacturers to make sure the software remains up to date. Because drive manufacturers rarely change their drives’ basic characteristics, KINGSTAR is always up-to-date, and quickly and easily updated if and when necessary. For any exceptions, KINGSTAR has an ESI import tool to import new or updated hardware information to its auto-configuration based on the ESI file.
WHAT MAKES KINGSTAR DIFFERENT
Auto-configuration saves time, prevents hassle, and improves productivity. Engineers no longer need to spend countless hours downloading, installing, and configuring independent drives. Instead, the network is always up to date. KINGSTAR’s list of supported motors continues to grow to keep pace with the market. Even if KINGSTAR does not include a drive that you need to use, you can import it into KINGSTAR when you install your new drive, and it will be instantly registered and configured. This ensures that KINGSTAR remains the most open and flexible soft motion platform on the market.
KINGSTAR is the only EtherCAT configuration tool that imports the list of settings available in the drive(s). The functions used are selected at runtime using the KINGSTAR API.
KINGSTAR also makes it simple to make changes to your system. Using the traditional configuration process, each update requires a change to the EtherCAT Network Information (ENI) file, which must be executed by a high-level software engineer. These employees are not typically on-site for most manufacturers, which means that for every change, you must wait for the right resource to be available to address the problem.
With KINGSTAR, mechanical technicians can easily see what’s out there, and make any necessary adjustments in real time, on site, without waiting for specialized support or expertise. With KINGSTAR, your machine automation systems not only benefit from time and cost savings of soft motion control, but auto-configuration also guarantees that your infrastructure is truly “future proof,” ready and waiting for the latest advances that will differentiate your business.
Benefits of KINGSTAR Auto-Configuration
- Instant configuration of all major I/O motors and drives
- Automatic updates for new, replaced, or edited servos
- No need to run and manage separate ENI files
- Easily configured by on-site resources
- Open to all devices, with the ability to add new devices quickly and easily
- The most complete device list available on the market
The content & opinions in this article are the author’s and do not necessarily represent the views of ManufacturingTomorrow
Comments (0)
This post does not have any comments. Be the first to leave a comment below.
Featured Product

